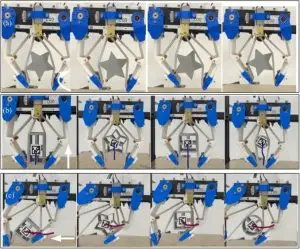
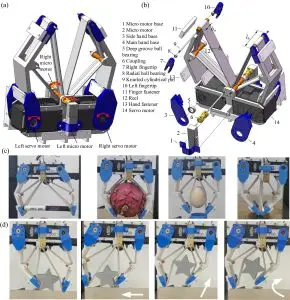
The proposed active surfaces gripper uses two actuated elastic bands to generate dexterous manipulation capabilities. (a) In the 3D model of the gripper, the red arrow indicates the direction of the actuated degrees of freedom. (b) An exploded view of the gripper with active surfaces. (c) The gripper implements adaptive gripping of real-world objects of different sizes and shapes. (d) Active conveying motion of the elastic bands and finger swing achieve in-plane translation and rotation of a non-convex polyhedron.