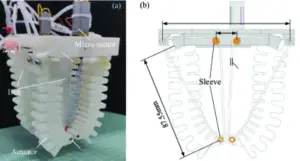
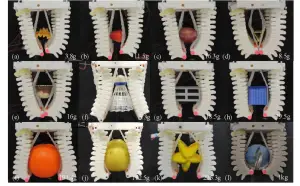
易碎物体的安全手内操作是机器人抓取领域的关键难点,传统夹持器刚性较强、力控精度不足,易对易碎物体造成挤压损伤,难以实现稳定抓取与操控。与上一项目(基于自适应包裹与主动弹性带的夹持器)相比,本项目核心差异在于聚焦易碎物体的安全操控需求,摒弃弹性带驱动模式,采用柔性主动表面+3D打印气囊结构,以气压驱动为核心,更侧重夹持的温和性与压力精细调控,而非刚性支撑与包裹适配;本项目提出一种柔性主动表面夹持器设计方案,以柔性结构为核心,结合主动驱动技术,实现对易碎物体的温和、稳定夹持,有效解决易碎物体抓取过程中的损伤问题,提升手内操作的安全性与可靠性,为易碎品加工、精密仪器装配、医疗样品操控等场景提供技术支撑。