Eight-Cable Three-Degree-of-Freedom Cable-Driven Parallel Robot
八绳索三自由度绳驱动并联机器人
项目概述

本项目聚焦于八绳索三自由度绳驱动并联机器人的研发与优化,核心目标是打造一款结构可靠、控制精准、交互便捷的绳驱动机器人系统,突破传统并联机器人在工作空间、负载适应性及轨迹控制上的局限。结合当前课题相关研究成果来看,绳驱动并联机器人凭借结构简单、质量轻、工作空间大的优势,已成为机器人领域的研究热点,尤其在冗余驱动、工作空间优化、轨迹控制等方面的研究不断深入。项目期间,团队结合课题相关研究进展,完成了机器人的全流程研发工作,包括数学建模与仿真分析、负载影响研究、轨迹优化设计、工作空间关系探讨及人机交互模式研发,构建了从机械结构到控制系统、从仿真测试到实际应用的完整技术体系,同时呼应课题相关研究重点,为绳驱动机器人在工业搬运、精密操作等场景的应用奠定了坚实基础。
个人负责工作
本人全程参与项目研发,牵头负责机器人机械结构、通讯系统、上下位机系统、执行器及仿真系统的设计与开发工作,同时深度参与负载变化与轨迹规划相关研究,具体职责如下:
- 机器人机械结构设计 主导机器人机械结构的设计、优化与制造全流程,围绕工作空间需求实现结构精准适配:设计并制造四套单卷筒双绳驱动系统,通过反复调试优化结构参数,确保绳索驱动的稳定性与同步性;研发碳纤维动态平台,兼顾结构轻量化与刚性需求,提升机器人末端动平台的运动精度;设计可精细调节绳索长度的专用系统,解决绳索张力不均、长度偏差等问题,保障机器人运动的精准度与可靠性。
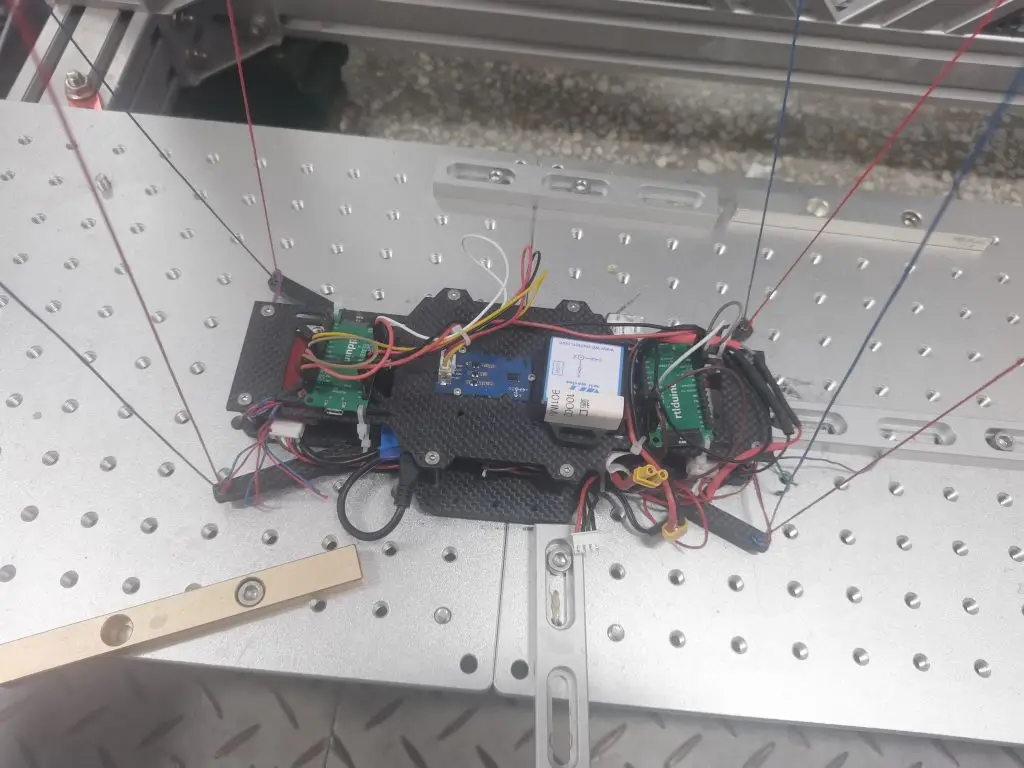
- 机器人通讯系统设计 搭建多模块协同的通讯架构,实现各组件间的数据高效传输与指令交互:动平台搭载的STM32主控芯片通过I2C协议读取IMU惯性测量数据,再通过WiFi模块将数据实时传输至上位机,同时接收上位机下发的执行器控制指令;部署变送器将八路压力传感器的模拟信号转换为数字信号,通过RS485总线传输至上位机,实现绳索张力的实时监测;设计CAN总线通讯方案,实现四个电机与上位机的双向通讯,上位机可实时读取电机位置、速度、扭矩及温度等关键参数,并通过CAN总线下发电机电流控制数据,保障电机运行的精准可控。
- 上位机系统开发 基于Simulink Desktop Real-time开发上位机控制系统,实现机器人的集中监控与精准控制:通过CAN总线接口实时采集电机位置、速度、电流(扭矩)、温度等运行数据,完成数据的实时解析与展示;集成PID控制算法,在Simulink环境中完成位置环、速度环、电流环的闭环计算,通过CAN总线将优化后的电流数据下发至电机,实现电机的精准调速与定位;通过RS485接口读取八路压力传感器数据,将所有监测数据同步保存至工作空间,为后续负载分析、轨迹优化提供数据支撑。
- 下位机及执行器系统设计 负责下位机与执行器的硬件选型、电路设计与程序开发:选用STM32作为下位机主控板,搭配BW16模块,通过串口实现STM32与BW16的通讯,由BW16负责WiFi数据的发送与接收,实现下位机与上位机的无线数据交互;设计STM32 GPIO口与三个电磁铁的连接电路,编写控制程序,实现电磁铁吸合状态的精准控制,满足机器人末端执行机构的动作需求。
- 机器人仿真系统开发 基于Simulink-Simscape搭建机器人仿真平台,完成运动学与动力学的全流程仿真:构建绳驱动机器人的正逆运动学模型,精准模拟绳索驱动的运动规律;开展动力学仿真分析,验证机械结构与控制系统的适配性;采用五次多项式算法进行轨迹规划仿真,优化机器人运动轨迹,减少运动过程中的冲击与抖动,提升机器人的运动平稳性与定位精度。
项目成果
- 论文发表:相关研究成果撰写为学术论文《Pick-and-place trajectory optimization for a two-DOF Cable-Suspended Modular Parallel Robot》,成功被EI收录,为绳驱动机器人轨迹优化领域提供了有价值的学术参考;《Minimum Jerk Trajectory Planning for a Redundant Actuated Three-DOF Cable-Suspended Parallel Robot with Parallelogram Architecture》,聚焦冗余驱动三自由度绳驱动并联机器人的最小冲击轨迹规划,结合项目中轨迹优化研究成果,提出基于最小冲击(Minimum Jerk)的轨迹规划方法,有效降低机器人运动过程中的冲击与抖动,进一步提升轨迹平滑性与运动稳定性,为同类机器人轨迹优化提供了新的技术思路与理论参考;
发明专利:
申请并获得发明专利1项,专利名称:《一种两自由度纯平动的悬吊式并联绳驱动搬运机器人》(专利号:CN202210592652.3),该专利聚焦于绳驱动机器人的结构创新,提升了机器人的搬运效率与运动稳定性,具备良好的产业化应用前景;